Nonlinear¶
CalcpadCE worksheets in this section present geometrically nonlinear truss analysis, where the equilibrium equations are written in the deformed configuration so that large displacements and snap-through behaviour are captured naturally.
The system of equations is implicit in the joint displacements and is therefore solved iteratively — by fixed-point iteration, Newton-Raphson, the secant method, and the built-in Root solver based on a modified Anderson-Björck bracketing scheme.
A symmetric two-bar Biot truss demonstrates the four numerical methods on a system that is linearly unstable: the equilibrium has to be derived for the deformed length \(l'(v) = \sqrt{(l + u)^2 + v^2}\) and the vertical reaction \(F_y(v) = E A \cdot \Delta l(v) / l \cdot v / l'(v)\) is then balanced against the applied load. A shallow Von-Mises truss extends the same formulation to a tube section with a small initial rise, where the load-displacement curve passes through a limit point and the post-buckling branch is followed. A prestressed asymmetric Biot truss combines geometric nonlinearity with a bilinear elastic-plastic material law, so that the element stiffness \(E A\) switches from \(E_0 A\) to \(E_1 A\) once the strain exceeds the yield value \(\varepsilon_y\), and a global Newton-Raphson loop updates the Jacobi matrix at each iteration.
A small SVG drawing library, svg_drawing.cpd, is included by each worksheet to render the undeformed and deformed configurations, supports and applied forces directly into the report.
Material and Geometric Nonlinear Analysis of Prestressed Asymmetric Biot Truss¶
Combined material and geometric nonlinear analysis of a prestressed three-joint truss with a bilinear elastic-plastic stress-strain law, solved by a global Newton-Raphson iteration that updates the Jacobi matrix and the axial stiffness \(E A\) at each step.
'<h4>Input data</h4>
#deg
#hide
δz = 10^-12
Precision = 10^-9
x_J = [0; 3; 9]*m
y_J = [0; 0; 0]*m
#show
x_J','y_J', 'n_J = len(x_J)
'<h4>Elements - [J1; J2]</h4>
#hide
E_J = [1; 2|2; 3]
#show
transp(E_J)', 'n_E = n_rows(E_J)', 'J_1(e) = E_J.(e; 1)', 'J_2(e) = E_J.(e; 2)
'Element endpoint coordinates
x_1(e) = x_J.J_1(e)','y_1(e) = y_J.J_1(e)', 'x_2(e) = x_J.J_2(e)','y_2(e) = y_J.J_2(e)
'Element lengths - 'l(e) = sqrt((x_2(e) - x_1(e))^2 + (y_2(e) - y_1(e))^2)
'Element directions -'c(e) = (x_2(e) - x_1(e))/l(e)','s(e) = (y_2(e) - y_1(e))/l(e)
'Transformation matrix
t(e) = [c(e); s(e)| - s(e); c(e)]
T(e) = add(t(e); add(t(e); matrix(4; 4); 1; 1); 3; 3)
'<h4>Supports - [Joint; cx; cy]</h4>
#hide
c_J = [1; 10^20kN/m; 10^20kN/m|3; 10^20kN/m; 10^20kN/m]
#show
c_J
n_c = n_rows(c_J)
'<h4>Material - steel</h4>
'We assume bi-linear material model
'Initial modulus of elasticity -'E_0 = 206GPa
'Yield stress -'f_y = 500MPa
'Ultimate tensile stress -'f_u = 600MPa
'Yield strain -'ε_y = f_y/E_0|‰
'Ultimate strain -'ε_u = 20‰
'Modulus of elasticity after yield -'E_1 = (f_u - f_y)/(ε_u - ε_y)|GPa
'Idealized stress-strain curve -'σ(ε) = if(ε < ε_y; E_0*ε; f_y + E_1*(ε - ε_y))
'<!--'PlotWidth = 200','PlotHeight = 150'-->
$Plot{σ(ε) @ ε = 0‰ : ε_u}
'<h4>Cross section – circular with diameter'Φ = 20mm'</h4>
'Area -'A = π*Φ^2/4|cm^2
'Stiffness
'Initial -'EA_0 = E_0*A', 'EA = EA_0
'After yield -'EA_1 = E_1*A
'<h4>Load - [Joint, Fx, Fy]</h4>
#hide
F_J = join_rows([2; 0kN; -70kN])
#show
F_J', 'n_F = n_rows(F_J)
'Prestressing force -'P = 20kN
'Initial stress -'σ_P = P/A|MPa
'Initial strain -'ε_P = σ_P/E_0
#include svg_drawing.cpd
#hide
Z = vector(2*n_J)*mm
w = max(x_J)
h = max(y_J)
W = 320
k = W/w
H = (h + 3m)*k
r = 3
x1(j) = (x_J.j + Z.(2*j - 1))*k
y1(j) = (h - y_J.j + Z.(2*j))*k
#def svg$ = '<svg viewbox="'-2.5m*k' '-1m*k' '(w + 5m)*k' 'H'" xmlns="http://www.w3.org/2000/svg" version="1.1" style="font-family: Georgia Pro Cond; font-size:11px; width:'W + 100'pt; height:'H + 100*H/W'pt">
#def thin_style$ = style="stroke:darkcyan; stroke-width:1; fill:none"
#def pin_style$ = style="stroke:red; stroke-width:1; fill:white"
#def thick_style$ = style="stroke:darkcyan; stroke-width:3; fill:none"
#def load_style$ = style="stroke:deepskyblue; stroke-width:1; fill:deepskyblue;"
#show
#val
svg$
#def frame$
#for i = 1 : n_E
#hide
x1 = x1(J_1(i))
y1 = y1(J_1(i))
x2 = x1(J_2(i))
y2 = y1(J_2(i))
#show
line$(x1; y1; x2; y2; main_style$)
dimh$(x1;x2;H-1.5m*k;'(x2-x1)/k'm)
#loop
#for i = 1 : n_c
#hide
j = c_J.(i; 1)
x1 = x1(j)
y1 = y1(j) + r
δ = w/30*k*sign(x1 - w/2*k)
x2 = x1 - δ
y2 = y1 - abs(δ)
x3 = x1 + δ
y3 = y1 + abs(δ)
#show
line$(x2; y3; x3; y3; thick_style$)
line$(x2; y3; x1; y1; thin_style$)
line$(x3; y3; x1; y1; thin_style$)
#loop
#for i = 1 : n_F
#hide
δ = 0.5m*k
j = F_J.(i; 1)
F_x = F_J.(i; 2)/kN
F_y = F_J.(i; 3)/kN
#show
#if F_x ≠ 0
#hide
δ_x = 3*δ*sign(F_x)
δ_y = 0.2*δ
x1 = x1(j) + r*sign(F_x)
y1 = y1(j)
#show
'<polygon points="'x1 - δ_x','y1' 'x1','y1' 'x1 - δ_x/5','y1 - δ_y' 'x1 - δ_x/5','y1 + δ_y' 'x1','y1'" load_style$ />
texth$(x1-2*δ_x/3;y1-2*δ_y;Fx='F_x'kN)
#end if
#if F_y ≠ 0
#hide
δ_x = 0.2*δ
δ_y = 3*δ*sign(F_y)
x1 = x1(j)
y1 = y1(j) + r*sign(F_y)
#show
'<polygon points="'x1','y1 + δ_y' 'x1','y1' 'x1 - δ_x','y1 + δ_y/5' 'x1 + δ_x','y1 + δ_y/5' 'x1','y1'" load_style$ />
textv$(x1-2*δ_x;y1+2*δ_y/3;Fy='F_y'kN)
#end if
#loop
#for j = 1 : n_J
circle$(x1(j); y1(j); r; pin_style$)
#if abs(Z.(2*j)) > δz*mm
textv$(x1(j)-0.2*δ; y1(j)+1.8*δ;'Z.(2*j)'mm)
#end if
#if abs(Z.(2*j - 1)) > δz*mm
texth$(x1(j)+1.5*δ; y1(j)+0.8*δ;'Z.(2*j - 1)'mm)
#end if
#loop
#end def
frame$
'</svg>
#equ
'<h4>Finite element formulation</h4>
'<!--'u = 0','v = 0','z = [0; 0]'-->
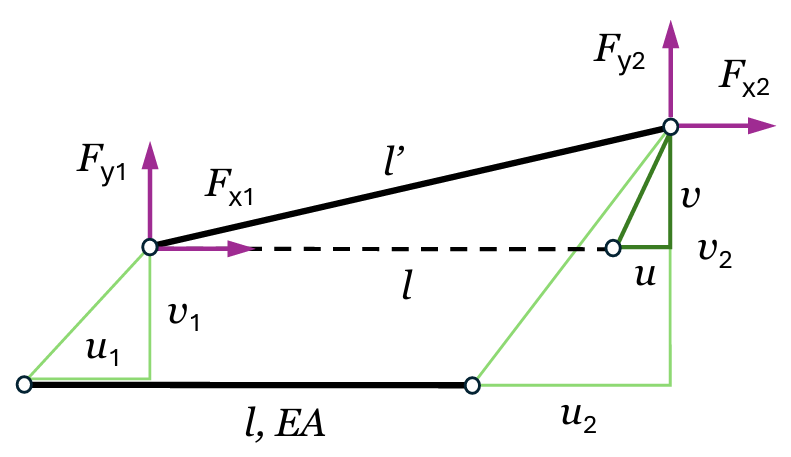
'We will formulate a 2D truss element with 3rd order geometric nonlinearity. The equilibrium equations will be derived in local CS, for the deformed state of the structure, assuming large displacements, as follows:
'<img style="height:115pt; width:198pt;" src="./Images/nonlin-truss-element.png" alt="nonlin-truss-element.png">
#noc
'Relative displacements -'u = u_2 - u_1', 'v = v_2 - v_1', 'z = [u; v]
#equ
'Length and elongation of the element in deformed state
l′(e; z) = sqrt((l(e) + z.1)^2 + z.2^2)','Δl(e; z) = l′(e; z) - l(e)', 'ε(e; z) = Δl(e; z)/l(e) + ε_P
'Directions of the displaced axis of the element in the deformed state
c_d(e; z) = (l(e) + z.1)/l′(e; z)', 's_d(e; z) = z.2/l′(e; z)
'Axial force in element -'N(e; z) = σ(ε(e; z))*A
'Horizontal reactive force at the right end -'F_x(e; z) = N(e; z)*c_d(e; z)
'Vertical reactive force at the right end -'F_y(e; z) = N(e; z)*s_d(e; z)
'Partial derivatives of element end reactive forces
F′_x1(e; z) = (1/l(e) - z.2^2/l′(e; z)^3)', ' _
F′_x2(e; z) = (z.2*(l(e) + z.1)/l′(e; z)^3)
F′_y1(e; z) = F′_x2(e; z)', ' _
F′_y2(e; z) = (1/l(e) - (l(e) + z.1)^2/l′(e; z)^3)
'We are not going to linearize the above equations by Taylor series. We will use them further directly in their implicit form.
'<h4>Solution by Newton-Raphson’s method</h4>
'We will express the parameters of the system as a function of the vector of t he unknown displacements:
Z = vector(2*n_J)*mm
'Initial deflection at the intermediate joint -'Z.(n_J + 1) = 100mm
'Extracting displacements for joint <var>j</var> -'z_J(j) = [Z.(2*j - 1); Z.(2*j)]
'Relative displacements for element <var>e</var> -' _
z_e(e) = t(e)*(z_J(J_2(e)) - z_J(J_1(e)))
'Element reactive forces partial vector -' _
F_e(e) = t(e)*[F_x(e; z_e(e)); F_y(e; z_e(e))]
'Partial element Jacobi matrix
J_e(e) = t(e)*[ _
F′_x1(e; z_e(e)); F′_x2(e; z_e(e))| _
F′_y1(e; z_e(e)); F′_y2(e; z_e(e))]
'Target precision -'ε_max = 10^-5
#hide
#for n = 1 : 100
z_J(j) = [Z.(2*j - 1); Z.(2*j)]
'Global load vector
F = vector(2*n_J)*kN
s = -1
'Add internal forces
#for e = 1 : n_E
#for k = 1 : 2
j = E_J.(e; k)
j_2 = 2*j
F.(j_2 - 1) = F.(j_2 - 1) + take(1; F_e(e))*s
F.(j_2) = F.(j_2) + take(2; F_e(e))*s
s = -s
#loop
#loop
'Add support rections
#for i = 1 : n_c
j = c_J.(i; 1)
j_2 = 2*j
F.(j_2 - 1) = F.(j_2 - 1) + c_J.(i; 2)*Z.(j_2 - 1)
F.(j_2) = F.(j_2) + c_J.(i; 3)*Z.(j_2)
#loop
'Add external loads
#for i = 1 : n_F
j = F_J.(i; 1)
j_2 = 2*j
F.(j_2 - 1) = F.(j_2 - 1) + F_J.(i; 2)
F.(j_2) = F.(j_2) + F_J.(i; 3)
#loop
'Global Jacobi matrix
J = symmetric(2*n_J)*kN/m
'Add element Jacobi matrices
#for e = 1 : n_E
ε = ε(e; z_e(e))
EA = if(ε < ε_y; EA_0; max(EA_0/10; EA_1))
#for i = 1 : 2
#for j = 1 : 2
k = if(i ≡ j; EA; -EA)
i_1 = 2*E_J.(e; i) - 1
j_1 = 2*E_J.(e; j) - 1
add(k*J_e(e); J; i_1; j_1)
#loop
#loop
#loop
'Add support springs
#for i = 1 : n_c
j = c_J.(i; 1)
C_x = c_J.(i; 2)
C_y = c_J.(i; 3)
j_1 = 2*j - 1
j_2 = 2*j
J.(j_1; j_1) = J.(j_1; j_1) + C_x
J.(j_2; j_2) = J.(j_2; j_2) + C_y
#loop
Z_0 = Z
δZ = clsolve(J; F)|mm
Z = Z_0 - δZ
ε = norm_e(δZ)/norm_e(Z)
#if ε < ε_max
#break
#end if
#loop
#show
'Iteratively calculate the following equations of the Newton-Raphson’s method:
#noc
Z_0 = Z','δZ = clsolve(J(Z); F(Z))|mm','Z = Z_0 - δZ','ε = norm_e(δZ)/norm_e(Z) < ε_max
#equ
'Convergence reached at iteration -'n'. Relative error -'ε
'<h4>Results</h4>
'<p><strong>Joint displacements</strong> -'Z(j) = round(z_J(j)/δz)*δz'</p>
#novar
#for j = 1 : n_J
#if norm_1(Z(j)) > δz*mm
#val
'<p>Joint <b>J'j'</b> - <var>Z</var><sub>'j
#equ
'</sub> ='Z(j)'</p>
#end if
#loop
#varsub
'<p><strong>Reactions in supports</strong></p>
r(i) = row(c_J; i)','j(i) = take(1; r(i))', ' _
R(i) = -z_J(j(i))*last(r(i); 2)
#novar
#for i = 1 : n_c
#val
'<p>Joint <b>J'j(i)'</b> - <var>R</var><sub>'i
#equ
'</sub> ='R(i)'</p>
#loop
#varsub
'Element yield capacity -'N_y = f_y*A
'Element ultimate capacity -'N_u = f_u*A
'<p><strong>Element axial forces</strong> -'N_e(e) = N(e; z_e(e))'</p>
#novar
#for e = 1 : n_E
#val
'<p>Element <b>Е'e'</b> - <var>N</var><sub>'e'
#equ
'</sub> ='N_e(e)'</p>
#loop
#varsub
#val
#hide
k = W/w
δ = 0.5m*k
#show
svg$
'<polygon points="'0','0' '0','-3*δ' '-0.2*δ','-2.4*δ' '0.2*δ','-2.4*δ' '0','-3*δ'" load_style$/>
'<polygon points="'W','0' 'W','-3*δ' 'W - 0.2*δ','-2.4*δ' 'W + 0.2*δ','-2.4*δ' 'W','-3*δ'" load_style$/>
'<polygon points="'r','0' '-3*δ','0' '-2.4*δ','-0.2*δ' '-2.4*δ','0.2*δ' '-3*δ','0'" load_style$/>
'<polygon points="'W + r','0' 'W + 3*δ','0' 'W + 2.4*δ','-0.2*δ' 'W + 2.4*δ','0.2*δ' 'W + 3*δ','0'" load_style$/>
texth$(-2*δ;-0.5*δ;Rx='take(1; R(1))'kN)
texth$(W+2*δ;-0.5*δ;Rx='take(1; R(2))'kN)
texth$(2*δ;-3.2*δ;Ry='take(2; R(1))'kN)
texth$(W-2*δ;-3.2*δ;Ry='take(2; R(2))'kN)
frame$
'</svg>
#equ
⃗xJ = [0 m 3 m 9 m] , ⃗yJ = [0 m 0 m 0 m] , nJ = len ( ⃗xJ ) = 3
transp ( EJ ) = 12 23 , nE = nrows ( EJ ) = 2 , J1 ( e ) = EJ.e,1 , J2 ( e ) = EJ.e,2
Element endpoint coordinates
x1 ( e ) = ⃗xJ.J1 ( e ) , y1 ( e ) = ⃗yJ.J1 ( e ) , x2 ( e ) = ⃗xJ.J2 ( e ) , y2 ( e ) = ⃗yJ.J2 ( e )
Element lengths - l ( e ) = √ ( x2 ( e ) − x1 ( e ) ) 2 + ( y2 ( e ) − y1 ( e ) ) 2
Element directions - c ( e ) = x2 ( e ) − x1 ( e ) l ( e ) , s ( e ) = y2 ( e ) − y1 ( e ) l ( e )
Transformation matrix
t ( e ) = [c ( e ) ; s ( e ) | -s ( e ) ; c ( e ) ]
T ( e ) = add ( t ( e ) ; add ( t ( e ) ; matrix ( 4; 4 ) ; 1; 1 ) ; 3; 3 )
cJ = 11020 kN ∕ m1020 kN ∕ m 31020 kN ∕ m1020 kN ∕ m
nc = nrows ( cJ ) = 2
We assume bi-linear material model
Initial modulus of elasticity - E0 = 206 GPa
Yield stress - fy = 500 MPa
Ultimate tensile stress - fu = 600 MPa
Yield strain - εy = fyE0 = 500 MPa206 GPa = 2.43 ‰
Ultimate strain - εu = 20 ‰
Modulus of elasticity after yield - E1 = fu − fyεu − εy = 600 MPa − 500 MPa20 ‰ − 2.43 ‰ = 5.69 GPa
Idealized stress-strain curve - σ ( ε ) = {if ε < εy: E0 · ε
else: fy + E1 · ( ε − εy )

Area - A = π · Φ24 = 3.14 · ( 20 mm ) 24 = 3.14 cm2
Stiffness
Initial - EA0 = E0 · A = 206 GPa · 3.14 cm2 = 64716.8 kN , EA = EA0 = 64716.8 kN
After yield - EA1 = E1 · A = 5.69 GPa · 3.14 cm2 = 1787.76 kN
FJ = 20 kN-70 kN , nF = nrows ( FJ ) = 1
Prestressing force - P = 20 kN
Initial stress - σP = PA = 20 kN3.14 cm2 = 63.66 MPa
Initial strain - εP = σPE0 = 63.66 MPa206 GPa = 0.000309
We will formulate a 2D truss element with 3rd order geometric nonlinearity. The equilibrium equations will be derived in local CS, for the deformed state of the structure, assuming large displacements, as follows:
Relative displacements - u = u2 − u1 , v = v2 − v1 , ⃗z = [u; v]
Length and elongation of the element in deformed state
l′ ( e; z ) = √ ( l ( e ) + z1 ) 2 + z22 , Δl ( e; z ) = l′ ( e; z ) − l ( e ) , ε ( e; z ) = Δl ( e; z ) l ( e ) + εP
Directions of the displaced axis of the element in the deformed state
cd ( e; z ) = l ( e ) + z1l′ ( e; z ) , sd ( e; z ) = z2l′ ( e; z )
Axial force in element - N ( e; z ) = σ ( ε ( e; z ) ) · A
Horizontal reactive force at the right end - Fx ( e; z ) = N ( e; z ) · cd ( e; z )
Vertical reactive force at the right end - Fy ( e; z ) = N ( e; z ) · sd ( e; z )
Partial derivatives of element end reactive forces
F′x1 ( e; z ) = 1l ( e ) − z22l′ ( e; z ) 3 , F′x2 ( e; z ) = z2 · ( l ( e ) + z1 ) l′ ( e; z ) 3
F′y1 ( e; z ) = F′x2 ( e; z ) , F′y2 ( e; z ) = 1l ( e ) − ( l ( e ) + z1 ) 2l′ ( e; z ) 3
We are not going to linearize the above equations by Taylor series. We will use them further directly in their implicit form.
We will express the parameters of the system as a function of the vector of t he unknown displacements:
⃗Z = vector ( 2 · nJ ) · mm = vector ( 2 · 3 ) · mm = [0 mm 0 mm 0 mm 0 mm 0 mm 0 mm]
Initial deflection at the intermediate joint - ⃗Z4 = 100 mm
Extracting displacements for joint j - zJ ( j ) = [⃗Z2 · j − 1; ⃗Z2 · j]
Relative displacements for element e - ze ( e ) = t ( e ) · ( zJ ( J2 ( e ) ) − zJ ( J1 ( e ) ) )
Element reactive forces partial vector - Fe ( e ) = t ( e ) · [Fx ( e; ze ( e ) ) ; Fy ( e; ze ( e ) ) ]
Partial element Jacobi matrix
Je ( e ) = t ( e ) · [F′x1 ( e; ze ( e ) ) ; F′x2 ( e; ze ( e ) ) | F′y1 ( e; ze ( e ) ) ; F′y2 ( e; ze ( e ) ) ]
Target precision - εmax = 10-5
Iteratively calculate the following equations of the Newton-Raphson’s method:
⃗Z0 = ⃗Z , ⃗δZ = clsolve ( J ( ⃗Z ) ; F ( ⃗Z ) ) , ⃗Z = ⃗Z0 − ⃗δZ , ε = norme ( ⃗δZ ) norme ( ⃗Z ) < εmax
Convergence reached at iteration - n = 33 . Relative error - ε = 7.27×10-6
Joint displacements - Z ( j ) = round(zJ ( j ) δz) · δz
Joint J2 - Z2 = Z ( 2 ) = [-44.7 mm 772.72 mm]
Reactions in supports
r ( i ) = row ( cJ; i ) , j ( i ) = take ( 1; r ( i ) ) , R ( i ) = -zJ ( j ( i ) ) · last ( r ( i ) ; 2 )
Joint J1 - R1 = R ( 1 ) = [-179.81 kN -47.01 kN]
Joint J3 - R2 = R ( 2 ) = [179.81 kN -22.99 kN]
Element yield capacity - Ny = fy · A = 500 MPa · 3.14 cm2 = 157.08 kN
Element ultimate capacity - Nu = fu · A = 600 MPa · 3.14 cm2 = 188.5 kN
Element axial forces - Ne ( e ) = N ( e; ze ( e ) )
Element Е1 - N1 = Ne ( 1 ) = 185.86 kN
Element Е2 - N2 = Ne ( 2 ) = 181.27 kN
Nonlinear Analysis of a Von-Mises Truss 🎬¶
Shallow Von-Mises truss with circular pipe section, animated load-displacement curve passing through a limit point, solved by fixed-point iteration, Newton-Raphson, the secant method and the built-in Root solver.
'(solved by four different numerical methods)
'<h4>Input data</h4>
'Half span -'a = 2m', ''Height -'h = -0.5m
'Cross section - circular pipe with diameter'Φ = 100mm'and thickness't = 4mm
'Material - steel. Modulus of elasticity -'E = 210GPa
'Vertical force -'F_y = 2000kN
#include svg_drawing.cpd
#hide
v = 0mm
L = a/2cm
H = h/cm
H_lin = H
H_nl = H
k = L/10
W = 2*(L + 6*k)
Y = H
F_y,max = 2500kN
v_max = abs(2.26*h)
#def svg$ = '<svg viewbox="'-6*k' 'Y' 'W' 'abs(H)'" xmlns="http://www.w3.org/2000/svg" version="1.1" style="font-family: Georgia Pro; font-size:7px; width:'420'pt; height:'400*abs(H)/L'pt">
#def thin_style$ = style="stroke:darkcyan; stroke-width:1; fill:none;"
#def dash_style$ = style="stroke:#ddd; stroke-width:1; stroke-dasharray: 7 3; fill:none;"
#def ghost_style$ = style="stroke:#ddd; stroke-width:1; fill:white;"
#def lin_style$ = style="stroke:#ccc; stroke-width:2; fill:none;"
#def pin_style$ = style="stroke:red; stroke-width:1; fill:white;"
#def thick_style$ = style="stroke:darkcyan; stroke-width:3; fill:none;"
#def load_style$ = style="stroke:deepskyblue; stroke-width:1; fill:deepskyblue;"
#show
#def frame$
line$(0; 0; L; H; dash_style$)
line$(L; H; 2*L; 0; dash_style$)
line$(0; 0; L; H_lin; lin_style$)
line$(L; H_lin; 2*L; 0; lin_style$)
circle$(L; H_lin; 2.5; ghost_style$)
line$(0; 0; L; H_nl; main_style$)
line$(L; H_nl; 2*L; 0; main_style$)
#hide
x1 = 0
y1 = k/10
#show
#for i = 1 : 2
#hide
δ = 0.8*k
x2 = x1 - δ
y2 = y1 - abs(δ)
x3 = x1 + δ
y3 = y1 + abs(δ)
#show
line$(x2; y3; x3; y3; thick_style$)
line$(x2; y3; x1; y1; thin_style$)
line$(x3; y3; x1; y1; thin_style$)
#hide
x1 = x1 + 2*L
#show
#loop
'<polygon points="'L','H_nl - 4*δ' 'L','H_nl - 0.32*δ' 'L - 0.32*δ','H_nl - 1.4*δ' 'L + 0.32*δ','H_nl - 1.4*δ' 'L','H_nl - 0.32*δ'" load_style$ />
texth$(L+20;H_nl-3.2*δ;Fy='F_y'kN)
dimh$(0; L; (1-2*sign(H_nl))*k; 'a'm)
dimh$(L; 2*L; (1-2*sign(H_nl))*k; 'a'm)
#if H_nl < 0
dimv$(L - k; H_nl; 0; 'h + v'm)
#else
dimv$(L - k; 0; H_nl; 'h + v'm)
#end if
circle$(0; 0; 2.5; pin_style$)
circle$(L; H_nl; 2.5; pin_style$)
circle$(2*L; 0; 2.5; pin_style$)
#end def
#val
svg$
frame$
'</svg>
#equ
'<h4>Linear Solution</h4>
'Strut length -'l = srss(a; h)
'Area -'A = π*(Φ^2 - (Φ - 2*t)^2)/4|cm^2
'Axial stiffness -'EA = E*A
'Axial forces in bars -'N(F) = F*l/(2*h)', 'N(F_y)
'Vertical displacement -'v_l(F) = -sqrt((l + (N(F)*l)/EA)^2 - a^2) - h|mm
v_l(F_y)
'<h4>Nonlinear Solution</h4>
'The vertical displacement is the only unknown - <var>v</var> = ?
'We will use 3-rd order geometric nonlinearity theory for the solution. The equilibrium equations are then derived for the deformed state of the structure, as follows:
'Length and elongation in deformed state
l′(v) = sqrt(a^2 + (h + v)^2)','Δl(v) = l′(v) - l
'Horizontal reaction -'F_x(v) = EA*(Δl(v)/l)*(a/l′(v))
'Vertical reaction -'F_y(v) = EA*(Δl(v)/l)*((h + v)/l′(v))
'Vertical reaction derivative -'F′_yv(v) = EA*(1/l - a^2/l′(v)^3)
'<h4>1. Fixed point iteration method</h4>
'Relative strain -'ε = F_y/(2*EA)
'Relative precision -'δ_max = 10^-5
'Initial value -'v_0 = 1mm
'We express the unknown vertical displacement at the middle joint as a function of the vertical force:
v = sqrt(1/(1/l - ε/(h + v_0))^2 - a^2) - h|mm
#hide
n = 0
#repeat 100
n = n + 1
v_0 = v
v = sqrt(1/(1/l - ε/(h + v_0))^2 - a^2) - h|mm
δ = abs(v - v_0)
#if δ < δ_max*abs(v)
#break
#end if
#loop
#show
'After calculating the above expression iteratively'n'times, we get:
v
'Relative error -'δ = abs(v - v_0)/abs(v)
'<h4>2. Newton-Raphson′s method</h4>
'Initial value -'v_0 = 0mm
'We repeatedly calculate the following expression:
v = v_0 - (2*F_y(v_0) - F_y)/F′_yv(v_0)
#hide
n = 0
#repeat 100
n = n + 1
v_0 = v
v = v_0 - (2*F_y(v_0) - F_y)/(2*F′_yv(v_0))
δ = abs(v - v_0)
#if δ < δ_max*abs(v)
#break
#end if
#loop
#show
'After'n'iterations we get:'v
'Relative error -'δ = abs(v - v_0)/abs(v)
'<h4>3. Secant method</h4>
'Slope reduction factor -'α = 1
'Initial value -'v_0 = 0mm
'Force value -'F_y0 = 2*F_y(v_0)
'We calculate the first approximation using Newton-Raphson′s method
v_1 = v_0 - α*((F_y0 - F_y)/(2*F′_yv(v_0)))
'Force value -'F_y1 = 2*F_y(v_1)
'The next approximation is evaluated by the formula:
v_2 = v_1 - α*(F_y1 - F_y)*((v_1 - v_0)/(F_y1 - F_y0))
'We continue the calculations iteratively until we reach convergence.
#hide
n = 0
#repeat 100
n = n + 1
v_0 = v_1
v_1 = v_2
F_y0 = 2*F_y(v_0)
F_y1 = 2*F_y(v_1)
v_2 = v_1 - α*(F_y1 - F_y)*((v_1 - v_0)/(F_y1 - F_y0))
δ = abs(v_2 - v_1)
#if δ < δ_max*abs(v_2)
#break
#end if
#loop
#show
'After'n'iterations we get:'v_2
'Relative error -'δ = abs(v_2 - v_1)/abs(v_2)
'<h4>4. Solution with Calcpad <small>(modified Anderson-Bjork′s method)</small></h4>
v = $Root{2*F_y(v) = F_y @ v = 0mm : 200m}
'System behavior graph (force-displacement)
'<!--'PlotWidth = 400','PlotHeight = 180','ReturnAngleUnits = 1'-->
#def plot$
#hide
v_2 = v
F′ = 2*F′_yv(v)
dv = min(2000kN/F′; v_max/6)
v_1(v) = min(max(0mm; v_2 + (1 - 2*v/v_max)*dv); v_max)
F_1(v) = F_y + F′*(v_1(v) - v_2)
#show
$Plot{F_y & 2*F_y(v) & v_1(v)|F_1(v) & v_l(F_y)|F_y & v_2|F_y @ v = 0mm : v_max}
#end def
plot$
'<h4>Results</h4>
'Axial forces in bars -'N = Δl(v)/l*EA
'Rotation angle -'α = atan2(l; v)
'Reactions in supports
'Horizontal -'R_x = F_x(v)'='N*cos(α)
'Vertical -'R_y = F_y(v)'='N*sin(α)
#hide
L = a/2cm
k = L/10
δ = 0.7*k
#show
#val
#def results$
#hide
N = round(Δl(v)/l*EA)
α = atan2(l; v)
R_x = F_x(v)'='N*cos(α)
R_y = F_y(v)'='N*sin(α)
H_lin = (h + v_l(F_y))/cm
H_nl = (h + v)/cm
Y = H + 2*k
#show
svg$
'<polygon points="'0','0' '0','-4*δ' '-0.32*δ','-2.8*δ' '0.32*δ','-2.8*δ' '0','-4*δ'" load_style$/>
'<polygon points="'2*L','0' '2*L','-4*δ' '2*L - 0.32*δ','-2.8*δ' '2*L + 0.32*δ','-2.8*δ' '2*L','-4*δ'" load_style$/>
'<polygon points="'-0.32*δ','0' '-4*δ','0' '-2.8*δ','-0.32*δ' '-2.8*δ','0.32*δ' '-4*δ','0'" load_style$/>
'<polygon points="'2*L + 0.32*δ','0' '2*L + 4*δ','0' '2*L + 2.8*δ','-0.32*δ' '2*L + 2.8*δ','0.32*δ' '2*L + 4*δ','0'" load_style$/>
texth$(-4*δ;-δ;Rx='round(R_x)'kN)
texth$(2*L+4*δ;-δ;Rx='round(R_x)'kN)
texth$(3.2*δ;-3.2*δ;Ry='round(R_y)'kN)
texth$(2*L-3.2*δ;-3.2*δ;Ry='round(R_y)'kN)
texth$(L/2;0;N='N'kN)
texth$(3*L/2;0;N='N'kN)
frame$
'</svg>
#end def
results$
#hide
n = 51
#show
'<style>.fr{display:none;}</style>
#for j = 1 : n
#hide
F_y = F_y,max*(j - 1)/(n - 1)
v = $Root{2*F_y(v) = F_y @ v = 0mm : 200m}
#show
'<div class="fr" id="fr-'j'">
plot$
results$
'</div>
#loop
'<script>(function(){$("#fr-1").show();var i=1;var fr=$("#fr-1");setInterval(function(){fr.hide();if(++i>'n')i=1;fr=$("#fr-"+i);fr.show();}, 100);})();</script>
#equ
(solved by four different numerical methods)
Half span - a = 2 m , 'Height - h = -0.5 m
Cross section - circular pipe with diameter Φ = 100 mm and thickness t = 4 mm
Material - steel. Modulus of elasticity - E = 210 GPa
Vertical force - Fy = 2000 kN
Strut length - l = srss ( a; h ) = srss ( 2 m; -0.5 m ) = 2.06 m
Area - A = π · ( Φ2 − ( Φ − 2 · t ) 2 ) 4 = 3.14 · ( ( 100 mm ) 2 − ( 100 mm − 2 · 4 mm ) 2 ) 4 = 12.06 cm2
Axial stiffness - EA = E · A = 210 GPa · 12.06 cm2 = 253338 kN
Axial forces in bars - N ( F ) = F · l2 · h , N ( Fy ) = N ( 2000 kN ) = -4123.11 kN
Vertical displacement - vl ( F ) = - (l + N ( F ) · lEA)2 − a2 − h
vl ( Fy ) = vl ( 2000 kN ) = 164.16 mm
The vertical displacement is the only unknown - v = ?
We will use 3-rd order geometric nonlinearity theory for the solution. The equilibrium equations are then derived for the deformed state of the structure, as follows:
Length and elongation in deformed state
l′ ( v ) = √ a2 + ( h + v ) 2 , Δl ( v ) = l′ ( v ) − l
Horizontal reaction - Fx ( v ) = EA · Δl ( v ) l · al′ ( v )
Vertical reaction - Fy ( v ) = EA · Δl ( v ) l · h + vl′ ( v )
Vertical reaction derivative - F′yv ( v ) = EA · (1l − a2l′ ( v ) 3)
Relative strain - ε = Fy2 · EA = 2000 kN2 · 253338 kN = 0.00395
Relative precision - δmax = 10-5
Initial value - v0 = 1 mm
We express the unknown vertical displacement at the middle joint as a function of the vertical force:
v = 1(1l − εh + v0)2 − a2 − h = 1(12.06 m − 0.00395-0.5 m + 1 mm)2 − ( 2 m ) 2 − ( -0.5 m ) = 838.68 mm
After calculating the above expression iteratively n = 7 times, we get:
v = 1105.47 mm
Relative error - δ = | v − v0 || v | = | 1105.47 mm − 1105.46 mm || 1105.47 mm | = 7.98×10-6
Initial value - v0 = 0 mm
We repeatedly calculate the following expression:
v = v0 − 2 · Fy ( v0 ) − FyF′yv ( v0 ) = 0 mm − 2 · Fy ( 0 mm ) − 2000 kNF′yv ( 0 mm ) = 276.68 mm
After n = 37 iterations we get: v = 1105.46 mm
Relative error - δ = | v − v0 || v | = | 1105.46 mm − 1105.46 mm || 1105.46 mm | = 9.67×10-10
Slope reduction factor - α = 1
Initial value - v0 = 0 mm
Force value - Fy0 = 2 · Fy ( v0 ) = 2 · Fy ( 0 mm ) = 0 kN
We calculate the first approximation using Newton-Raphson′s method
v1 = v0 − α · Fy0 − Fy2 · F′yv ( v0 ) = 0 mm − 1 · 0 kN − 2000 kN2 · F′yv ( 0 mm ) = 138.34 mm
Force value - Fy1 = 2 · Fy ( v1 ) = 2 · Fy ( 138.34 mm ) = 1273.37 kN
The next approximation is evaluated by the formula:
v2 = v1 − α · ( Fy1 − Fy ) · v1 − v0Fy1 − Fy0 = 138.34 mm − 1 · ( 1273.37 kN − 2000 kN ) · 138.34 mm − 0 mm1273.37 kN − 0 kN = 217.28 mm
We continue the calculations iteratively until we reach convergence.
After n = 37 iterations we get: v2 = 1105.46 mm
Relative error - δ = | v2 − v1 || v2 | = | 1105.46 mm − 1105.46 mm || 1105.46 mm | = 2.28×10-7
v = $Root{2 · Fy ( v ) = Fy; v ∈ [0 mm; 200 m]} = 1105.46 mm
System behavior graph (force-displacement)

Axial forces in bars - N = Δl ( v ) l · EA = Δl ( 1105.46 mm ) 2.06 m · 253338 kN = 3451.3 kN
Rotation angle - α = atan2 ( l; v ) = atan2 ( 2.06 m; 1105.46 mm ) = 28.2°
Reactions in supports
Horizontal - Rx = Fx ( v ) = Fx ( 1105.46 mm ) = 3303.25 kN = N · cos ( α ) = 3451.3 kN · cos ( 28.2° ) = 3041.6 kN
Vertical - Ry = Fy ( v ) = Fy ( 1105.46 mm ) = 1000 kN = N · sin ( α ) = 3451.3 kN · sin ( 28.2° ) = 1630.99 kN


















































Third Order Geometric Nonlinearity Analysis of a Double-Strut Biot System¶
Symmetric two-bar Biot truss in third-order geometric nonlinearity: the deformed length \(l'(v) = \sqrt{l^2 + v^2}\) enters the equilibrium directly and the vertical displacement is found by four different numerical methods.
'(solved by four different numerical methods)
'<h4>Input data</h4>
'Strut length -'l = 2m
'Material - steel. Modulus of elasticity -'E = 210GPa
'Cross section - circular with diameter'Φ = 20mm
'Area -'A = π*Φ^2/4|cm^2
'Axial stiffness -'EA = E*A
'Vertical force -'F_y = 20kN
#include svg_drawing.cpd
#hide
L = l/2cm
H = 0
k = L/10
#def svg$ = '<svg viewbox="'-5*k' '-5*k' '2*(L+5*k)' '10*k + H'" xmlns="http://www.w3.org/2000/svg" version="1.1" style="font-family: Georgia Pro; font-size:8px; width:'450'pt; height:'150'pt">
#def thin_style$ = style="stroke:darkcyan; stroke-width:1; fill:none"
#def pin_style$ = style="stroke:red; stroke-width:1; fill:white"
#def thick_style$ = style="stroke:darkcyan; stroke-width:3; fill:none"
#def load_style$ = style="stroke:deepskyblue; stroke-width:1; fill:deepskyblue;"
#show
#def frame$
line$(0; 0; L; H; main_style$)
line$(L; H; 2*L; 0; main_style$)
#hide
x1 = 0
y1 = k/10
#show
#for i = 1 : 2
#hide
δ = 0.8*k
x2 = x1 - δ
y2 = y1 - abs(δ)
x3 = x1 + δ
y3 = y1 + abs(δ)
#show
line$(x2; y3; x3; y3; thick_style$)
line$(x2; y3; x1; y1; thin_style$)
line$(x3; y3; x1; y1; thin_style$)
#hide
x1 = x1 + 2*L
#show
#loop
'<polygon points="'L','H - 4*δ' 'L','H - 0.32*δ' 'L - 0.32*δ','H - 1.4*δ' 'L + 0.32*δ','H - 1.4*δ' 'L','H - 0.32*δ'" load_style$ />
texth$(L+20;H-3.2*δ;Fy='F_y'kN)
dimh$(0; L; H+2*k; 'l'm)
dimh$(L; 2*L; H+2*k; 'l'm)
circle$(0; 0; 2.5; pin_style$)
circle$(L; H; 2.5; pin_style$)
circle$(2*L; 0; 2.5; pin_style$)
#end def
#val
svg$
frame$
'</svg>
#equ
'<h4>Solution</h4>
'Because of the symmetry, the horizontal displacement in the middle is'u = 0m'.
'The vertical displacement is the only unknown - <var>v</var> = ?
'Since the system is linearly unstable, we use 3-rd order geometric nonlinearity theory for the solution. The equilibrium equations are then derived for the deformed state of the structure, as follows:
'Length and elongation in deformed state
l′(v) = sqrt((l + u)^2 + v^2)','Δl(v) = l′(v) - l
'Horizontal reaction -'F_x(v) = EA*(Δl(v)/l)*((l + u)/l′(v))
'Vertical reaction -'F_y(v) = EA*(Δl(v)/l)*(v/l′(v))
'Vertical reaction derivative -'F′_yv(v) = EA*(1/l - (l + u)^2/l′(v)^3)
'<h4>1. Fixed point iteration method</h4>
'Relative strain -'ε = F_y/(2*EA)
'Relative precision -'δ_max = 10^-4
'Initial value -'v_0 = 200mm
'We express the unknown vertical displacement at the middle joint as a function of the vertical force:
v = sqrt(1/(1/l - ε/v_0)^2 - (l + u)^2)|mm
#hide
n = 0
#repeat 100
n = n + 1
v_0 = v
v = sqrt(1/(1/l - ε/v_0)^2 - (l + u)^2)|mm
δ = abs(v - v_0)
#if δ < δ_max*abs(v)
#break
#end if
#loop
#show
'After calculating the above expression iteratively'n'times, we get:
v
'Relative error -'δ = abs(v - v_0)/abs(v)
'<h4>2. Newton-Raphson′s method</h4>
'Initial value -'v_0 = 200mm
'We repeatedly calculate the following expression:
v = v_0 - (2*F_y(v_0) - F_y)/F′_yv(v_0)
#hide
n = 0
#repeat 100
n = n + 1
v_0 = v
v = v_0 - (2*F_y(v_0) - F_y)/(2*F′_yv(v_0))
δ = abs(v - v_0)
#if δ < δ_max*abs(v)
#break
#end if
#loop
#show
'After'n'iterations we get:'v
'Relative error -'δ = abs(v - v_0)/abs(v)
'<h4>3. Secant method</h4>
'Slope reduction factor -'α = 1
'Initial value -'v_0 = 200mm
'Force value -'F_y0 = 2*F_y(v_0)
'We calculate the first approximation using Newton-Raphson′s method
v_1 = v_0 - α*((F_y0 - F_y)/(2*F′_yv(v_0)))
'Force value -'F_y1 = 2*F_y(v_1)
'The next approximation is evaluated by the formula:
v_2 = v_1 - α*(F_y1 - F_y)*((v_1 - v_0)/(F_y1 - F_y0))
'We continue the calculations iteratively until we reach convergence.
#hide
n = 0
#repeat 100
n = n + 1
v_0 = v_1
v_1 = v_2
F_y0 = 2*F_y(v_0)
F_y1 = 2*F_y(v_1)
v_2 = v_1 - α*(F_y1 - F_y)*((v_1 - v_0)/(F_y1 - F_y0))
δ = abs(v_2 - v_1)
#if δ < δ_max*abs(v_2)
#break
#end if
#loop
#show
'After'n'iterations we get:'v_2
'Relative error -'δ = abs(v_2 - v_1)/abs(v_2)
'<h4>4. Solution with Calcpad <small>(modified Anderson-Bjork′s method)</small></h4>
v = $Root{2*F_y(v) = F_y @ v = 0mm : 200m}
'System behavior graph (force-displacement)
'<!--'v_2 = v','PlotWidth = 250','PlotHeight = 150'-->
$Plot{F_y & 2*F_y(v) & v_2|F_y @ v = 0mm : 200mm}
'<h4>Results</h4>
'Axial forces in bars -'N = Δl(v)/l*EA
'Rotation angle -'α = atan2(l; v)'°
'Reactions in supports
'Horizontal -'R_x = F_x(v)'='N*cos(α)
'Vertical -'R_y = F_y(v)'='N*sin(α)
#hide
H = v/cm
δ = 0.8*k
#show
#val
svg$
'<polygon points="'0','0' '0','-4*δ' '-0.32*δ','-2.8*δ' '0.32*δ','-2.8*δ' '0','-4*δ'" load_style$/>
'<polygon points="'2*L','0' '2*L','-4*δ' '2*L - 0.32*δ','-2.8*δ' '2*L + 0.32*δ','-2.8*δ' '2*L','-4*δ'" load_style$/>
'<polygon points="'-0.32*δ','0' '-4*δ','0' '-2.8*δ','-0.32*δ' '-2.8*δ','0.32*δ' '-4*δ','0'" load_style$/>
'<polygon points="'2*L + 0.32*δ','0' '2*L + 4*δ','0' '2*L + 2.8*δ','-0.32*δ' '2*L + 2.8*δ','0.32*δ' '2*L + 4*δ','0'" load_style$/>
texth$(-4*δ;-δ;Rx='R_x'kN)
texth$(2*L+4*δ;-δ;Rx='R_x'kN)
texth$(3*δ;-3.2*δ;Ry='R_y'kN)
texth$(2*L-3*δ;-3.2*δ;Ry='R_y'kN)
texth$(L/2;0;N='N'kN)
texth$(3*L/2;0;N='N'kN)
frame$
'</svg>
#equ
Because of the symmetry, the horizontal displacement in the middle is u = 0 m .
The vertical displacement is the only unknown - v = ?
Since the system is linearly unstable, we use 3-rd order geometric nonlinearity theory for the solution. The equilibrium equations are then derived for the deformed state of the structure, as follows:
Length and elongation in deformed state
l′ ( v ) = √ ( l + u ) 2 + v2 , Δl ( v ) = l′ ( v ) − l
Horizontal reaction - Fx ( v ) = EA · Δl ( v ) l · l + ul′ ( v )
Vertical reaction - Fy ( v ) = EA · Δl ( v ) l · vl′ ( v )
Vertical reaction derivative - F′yv ( v ) = EA · (1l − ( l + u ) 2l′ ( v ) 3)
Relative strain - ε = Fy2 · EA = 20 kN2 · 65973.4 kN = 0.000152
Relative precision - δmax = 10-4 = 0.0001
Initial value - v0 = 200 mm
We express the unknown vertical displacement at the middle joint as a function of the vertical force:
v = 1(1l − εv0)2 − ( l + u ) 2 = 1(12 m − 0.000152200 mm)2 − ( 2 m + 0 m ) 2 = 110.24 mm
After calculating the above expression iteratively n = 13 times, we get:
v = 134.51 mm
Relative error - δ = | v − v0 || v | = | 134.51 mm − 134.5 mm || 134.51 mm | = 7.6×10-5
Initial value - v0 = 200 mm
We repeatedly calculate the following expression:
v = v0 − 2 · Fy ( v0 ) − FyF′yv ( v0 ) = 200 mm − 2 · Fy ( 200 mm ) − 20 kNF′yv ( 200 mm ) = 106.93 mm
After n = 4 iterations we get: v = 134.51 mm
Relative error - δ = | v − v0 || v | = | 134.51 mm − 134.51 mm || 134.51 mm | = 9×10-6
Slope reduction factor - α = 1
Initial value - v0 = 200 mm
Force value - Fy0 = 2 · Fy ( v0 ) = 2 · Fy ( 200 mm ) = 65.48 kN
We calculate the first approximation using Newton-Raphson′s method
v1 = v0 − α · Fy0 − Fy2 · F′yv ( v0 ) = 200 mm − 1 · 65.48 kN − 20 kN2 · F′yv ( 200 mm ) = 153.46 mm
Force value - Fy1 = 2 · Fy ( v1 ) = 2 · Fy ( 153.46 mm ) = 29.67 kN
The next approximation is evaluated by the formula:
v2 = v1 − α · ( Fy1 − Fy ) · v1 − v0Fy1 − Fy0 = 153.46 mm − 1 · ( 29.67 kN − 20 kN ) · 153.46 mm − 200 mm29.67 kN − 65.48 kN = 140.89 mm
We continue the calculations iteratively until we reach convergence.
After n = 4 iterations we get: v2 = 134.51 mm
Relative error - δ = | v2 − v1 || v2 | = | 134.51 mm − 134.51 mm || 134.51 mm | = 1.57×10-6
v = $Root{2 · Fy ( v ) = Fy; v ∈ [0 mm; 200 m]} = 134.51 mm
System behavior graph (force-displacement)

Axial forces in bars - N = Δl ( v ) l · EA = Δl ( 134.51 mm ) 2 m · 65973.4 kN = 149.03 kN
Rotation angle - α = atan2 ( l; v ) = atan2 ( 2 m; 134.51 mm ) = 3.85 °
Reactions in supports
Horizontal - Rx = Fx ( v ) = Fx ( 134.51 mm ) = 148.69 kN = N · cos ( α ) = 149.03 kN · cos ( 3.85 ) = 148.69 kN
Vertical - Ry = Fy ( v ) = Fy ( 134.51 mm ) = 10 kN = N · sin ( α ) = 149.03 kN · sin ( 3.85 ) = 10 kN
Spotted an error? Edit these examples.