Numerical¶
CalcpadCE treats numerical methods as first-class citizens: built-in operators such as $Slope, $Derivative, $Integral and $Find, paired with vector and matrix primitives, let you build classical algorithms from the ground up and watch every intermediate step.
This category collects recurring themes of applied analysis — root finding and eigenvalue extraction, quadrature and differentiation, regression and stochastic sampling — each captured in a self-contained, parametric worksheet. Iteration is treated as a visible artefact: Newton's method animates its convergence step-by-step, while Monte-Carlo experiments replace deterministic refinement with statistical accumulation. Comparison sheets pit competing formulas against analytical references, exposing the accuracy-versus-cost trade-off behind every algorithm.
Sample size, tolerances and iteration counts are exposed at the top of every sheet, so each worksheet doubles as a numerical playground for convergence, stability and round-off experiments.
Monte Carlo Pi¶
Estimates \(\pi\) by sampling random points in the unit square and counting those falling inside the quarter circle. Includes a live SVG plot of the sample cloud coloured by inside-versus-outside membership, so accuracy and variance can be eyeballed at any sample size.
'Number of points -'n = 10000
'Point coordinates:
x = random(fill(vector_hp(n); 1))
y = random(fill(Vector_hp(n); 1))
'Point radii -'r = sqrt(x^2 + y^2)
'Result -'n_in = count(floor(r); 0; 1)', 'π_MC = 4*n_in/n
#val
#round 15
'<svg xmlns="http://www.w3.org/2000/svg" width="300" height="300" viewBox="-0.1 -0.1 1.2 1.2">
#for i = 1 : n
'<circle cx="'x.i'" cy="'1 - y.i'" r="0.002" stroke="none"
#if r.i < 1
'fill = "red"/>
#else
'fill = "blue"/>
#end if
#loop
'<rect x="0" y="0" width="1" height="1" fill="none" stroke="black" stroke-width="0.005"/>
'<path d="M 0 0 A 1 1 0 0 1 1 1" fill="none" stroke="black" stroke-width="0.005"/>
'</svg>
Number of points - n = 10000
Point coordinates:
⃗x = random ( fill ( vectorhp ( n ) ; 1 ) ) = random ( fill ( vectorhp ( 10000 ) ; 1 ) ) = [0.149 0.5 0.683 0.113 0.958 0.772 0.662 0.77 0.837 0.557 0.778 0.144 0.119 0.567 0.787 0.311 0.475 0.656 0.188 0.312 ... 0.574]
⃗y = random ( fill ( Vectorhp ( n ) ; 1 ) ) = random ( fill ( Vectorhp ( 10000 ) ; 1 ) ) = [0.683 0.493 0.0631 0.877 0.996 0.791 0.832 0.177 0.355 0.0308 0.845 0.825 0.907 0.467 0.961 0.76 0.576 0.46 0.946 0.835 ... 0.945]
Point radii - ⃗r = √ ⃗x⊙ 2 + ⃗y⊙ 2 = [0.699 0.703 0.685 0.884 1.38 1.11 1.06 0.79 0.909 0.558 1.15 0.838 0.914 0.734 1.24 0.822 0.747 0.801 0.964 0.891 ... 1.11]
Result - nin = count ( floor ( ⃗r ) ; 0; 1 ) = 7851 , πMC = 4 · ninn = 4 · 785110000 = 3.14
Newton's Method 🎬¶
Solves \(x^x = 10\) with Newton iteration and renders an animated SVG that highlights each tangent step. The frame loop turns convergence into a visual sequence rather than a printed iteration table.
#md on
#noc
'**Problem:** Given the following equation:'x^x = 10'. Find'x'= ? </p><p>
#equ
'**Solution:** Transform the equation in the form:'f(x) = x^x - 10'= 0</p>
'The first derivative is'f′(x) = x^x*(ln(x) + 1)
'Initial guess -'x_0 = 4', target precision -'δ = 10^-14
'#### Animation
'<style>#start{height:1.8em; padding-top:0;} .fr{display:none;} .Series3, .Series6{opacity:0;} .Series7{stroke-width:6pt;}</style>
#hide
#val
PlotWidth = 500','PlotHeight = 250','PlotSVG = 1','PlotAdaptive = 0
n = 100','x = x_0','a = 2','b = 4
#for i = 1 : n
y_0 = f(x_0)
#if i⦼2 ≡ 0
x = x_0 - f(x_0)/f′(x_0)
y = f(x)
y(x) = y_0 + (x - x_0)*f′(x_0)
#show
'<div class="fr" id="fr-'i'">
$Plot{f(ξ) & ξ|if(ξ ≥ x ∧ ξ ≤ x_0; y(ξ); 1/0) & 2|-50 & x|(ξ - a)*y/(b - a) & x|y & x_0|y_0 & x_0|y_0 @ ξ = a : b}
'</div>
#hide
x_0 = x
#else
#if abs(y_0) < δ
n = i - 4
#break
#end if
#show
'<div class="fr" id="fr-'i'">
$Plot{f(ξ) & x_0|y_0 & 2|-50 & x_0|(ξ - a)*y_0/(b - a) & x_0|y_0 & x_0|y_0 & x_0|y_0 @ ξ = a : b}
'</div>
#hide
#end if
#loop
#show
#equ
'After 'n' iterations we get:'x
'Check -'x^x', Error -'abs(x^x - 10)'<'δ
#val
'<script>(function(){$("#fr-1").show();var i=1;var fr=$("#fr-1");setInterval(function(){fr.hide();if(++i>'n')i=1;fr=$("#fr-"+i);fr.show();},1000);})();</script>
Problem: Given the following equation: xx = 10 . Find x = ?
Solution: Transform the equation in the form: f ( x ) = xx − 10 = 0
The first derivative is f′ ( x ) = xx · ( ln ( x ) + 1 )
Initial guess - x0 = 4 , target precision - δ = 10-14
After n = 13 iterations we get: x = 2.51
Check - xx = 2.512.51 = 10 , Error - | xx − 10 | = | 2.512.51 − 10 | = 8.88×10-15 < δ = 10-14
Least Squares Fitting¶
Fits a 10-point dataset with linear, quadratic and quintic polynomial models built from the normal equations \(X^T\, X\, a = X^T y\). All three curves are then plotted together so the residual pattern of each model is immediately visible.
'Point coordinates
x = [0; 1; 2; 3; 4; 5; 6; 7; 8; 9]
y = [400; 450; 440; 400; 380; 330; 250; 200; 150; 160]
'Number of points -'n = len(x)
e = fill(vector(n); 1)
'<h4>Linear fit</h4>
X = [e|x]
A = copy(X*transp(X); symmetric(n_rows(X)); 1; 1)
b = X*y
a_L = clsolve(A; b)
P_L(x) = dot(a_L; [1; x])
'<h4>Quadratic fit</h4>
X = [e|x|x^2]
A = copy(X*transp(X); symmetric(n_rows(X)); 1; 1)
b = X*y
a_Q = clsolve(A; b)
P_Q(x) = dot(a_Q; [1; x; x^2])
'<h4>Poly(5) fit</h4>
X = [e|x|x^2|x^3|x^4|x^5]
A = copy(X*transp(X); symmetric(n_rows(X)); 1; 1)
b = X*y
a_C = clsolve(A; b)
P_C(x) = dot(a_C; [1; x; x^2; x^3; x^4; x^5])
'<h4>Plot</h4>
#hide
PlotWidth = 250
PlotHeight = 150
#def P$ = x.1|y.1 & x.2|y.2 & x.3|y.3 & x.4|y.4 & x.5|y.5 & x.6|y.6 & x.7|y.7 & x.8|y.8 & x.9|y.9 & x.10|y.10
#show
$Plot{ξ|P_L(ξ) & P$ @ ξ = x.1 : x.n}
$Plot{ξ|P_Q(ξ) & P$ @ ξ = x.1 : x.n}
$Plot{ξ|P_C(ξ) & P$ @ ξ = x.1 : x.n}
Point coordinates
⃗x = [0; 1; 2; 3; 4; 5; 6; 7; 8; 9] = [0 1 2 3 4 5 6 7 8 9]
⃗y = [400; 450; 440; 400; 380; 330; 250; 200; 150; 160] = [400 450 440 400 380 330 250 200 150 160]
Number of points - n = len ( ⃗x ) = 10
⃗e = fill ( vector ( n ) ; 1 ) = fill ( vector ( 10 ) ; 1 ) = [1 1 1 1 1 1 1 1 1 1]
X = [⃗e | ⃗x] = 1111111111 0123456789
A = copy ( X · transp ( X ) ; symmetric ( nrows ( X ) ) ; 1; 1 ) = 1045 45285
⃗b = X · ⃗y = [3160 11240]
⃗aL = clsolve ( A; ⃗b ) = [478.55 -36.12]
PL ( x ) = dot ( ⃗aL; [1; x] )
X = [⃗e | ⃗x | ⃗x⊙ 2] = 1111111111 0123456789 0149162536496481
A = copy ( X · transp ( X ) ; symmetric ( nrows ( X ) ) ; 1; 1 ) = 1045285 452852025 285202515333
⃗b = X · ⃗y = [3160 11240 61500]
⃗aQ = clsolve ( A; ⃗b ) = [439 -6.46 -3.3]
PQ ( x ) = dot ( ⃗aQ; [1; x; x2] )
X = [⃗e | ⃗x | ⃗x⊙ 2 | ⃗x⊙ 3 | ⃗x⊙ 4 | ⃗x⊙ 5] = 1111111111 0123456789 0149162536496481 0182764125216343512729 0116812566251296240140966561 0132243102431257776168073276859049
A = copy ( X · transp ( X ) ; symmetric ( nrows ( X ) ) ; 1; 1 ) = 1045285202515333120825 45285202515333120825978405 2852025153331208259784058080425 202515333120825978405808042567731333 15333120825978405808042567731333574304985 1208259784058080425677313335743049854914341925
⃗b = X · ⃗y = [3160 11240 61500 396380 2811780 21200540]
⃗aC = clsolve ( A; ⃗b ) = [401.17 88.36 -54.04 12.51 -1.54 0.0731]
PC ( x ) = dot ( ⃗aC; [1; x; x2; x3; x4; x5] )



Numerical Differentiation¶
Compares the $Slope operator (Richardson extrapolation) against $Derivative (complex-step method) on \(e^x\) and \(\sin(x^2)\) at large arguments.
Exposes the round-off blow-up of finite differences and the machine-precision accuracy of the complex-step trick.
#md on
#rad
'Function -'f(x) = e^x', Point - 'a = 100
'Theoretical value -'f′(x) = e^x', 'y′_a = f′(a)
'**$Slope** function (Richardson extrapolation) -'y′_aS = $Slope{f(x) @ x = a}
'> Error -'δ = abs(y′_a - y′_aS)/y′_a|%'- <span class="err">Approx.</span>
'**$Derivative** function (Complex step method) -'y′_aD = $Derivative{f(x) @ x = a}
'> Error -'δ = abs(y′_a - y′_aD)/y′_a|%'- <span class="ok">Exact!!!</span>
'Function -'f(x) = sin(x^2)', Point -'a = 1000
'Theoretical value -'f′(x) = 2*x*cos(x^2)', 'y′_a = f′(a)
'**$Slope** function (Richardson extrapolation) -'y′_aS = $Slope{f(x) @ x = a}
'> Error -'δ = abs(y′_a - y′_aS)/y′_a|%'- <span class="err">Approx.</span>
'**$Derivative** function (Complex step method) -'y′_aD = $Derivative{f(x) @ x = a}
'> Error -'δ = abs(y′_a - y′_aD)/y′_a|%'- <span class="ok">Exact!!!</span>
Function - f ( x ) = ex , Point - a = 100
Theoretical value - f′ ( x ) = ex , y′a = f′ ( a ) = f′ ( 100 ) = 2.69×1043
$Slope function (Richardson extrapolation) - y′aS = dd x f ( x ) |x = a = 2.69×1043
Error - δ = | y′a − y′aS |y′a = | 2.69×1043 − 2.69×1043 |2.69×1043 = 5.92×10-10 % - Approx.
$Derivative function (Complex step method) - y′aD = dd x f ( x ) |x = a = 2.69×1043
Error - δ = | y′a − y′aD |y′a = | 2.69×1043 − 2.69×1043 |2.69×1043 = 0 % - Exact!!!
Function - f ( x ) = sin ( x2 ) !!! , Point - a = 1000
Theoretical value - f′ ( x ) = 2 · x · cos ( x2 ) , y′a = f′ ( a ) = f′ ( 1000 ) = 1873.5
$Slope function (Richardson extrapolation) - y′aS = dd x f ( x ) |x = a = 1873.5
Error - δ = | y′a − y′aS |y′a = | 1873.5 − 1873.5 |1873.5 = 1.15×10-8 % - Approx.
$Derivative function (Complex step method) - y′aD = dd x f ( x ) |x = a = 1873.5
Error - δ = | y′a − y′aD |y′a = | 1873.5 − 1873.5 |1873.5 = 0 % - Exact!!!
Numerical Integration¶
Evaluates \(\int_{-1}^{1}\sqrt{1-x^2}\, dx\) with three quadrature rules — Boole (Newton-Cotes), Gauss-Legendre and tanh-sinh — at five nodes. Tabulates the relative error of each scheme against the analytical result \(\pi/2\).
'Function -'f(x) = sqrt(1 - x^2)
'Theoretical value of the integral - 'I = π/2
'Number of nodes -'n = 5
'<h4>Boole′s rule (Newton-Cotes for n = 4)</h4>
'<hr/>
'Step -'h = 0.5
'<p><strong>Abscissas, Ordinates</strong></p>
x_1 = -1', 'y_1 = f(x_1)
x_2 = -0.5', 'y_2 = f(x_2)
x_3 = 0', 'y_3 = f(x_3)
'<p><strong>Integral</strong></p>
'Value -'I_B = 2*h/45*(2*7*y_1 + 2*32*y_2 + 12*y_3)
'Error -'δ_B = abs(I_B - I)/I|%
#hide
PlotWidth = 300
PlotHeight = 150
#show
'<p><strong>Scheme</strong></p>
$Plot{f(x) & x_1|0 & x_2|0 & x_3|0 & -x_2|0 & -x_1|0 @ x = -1 : 1}
'<h4>Gauss-Legendre rule</h4>
'<hr/>
'<p><strong>Abscissas, Ordinates and weights</strong></p>
x_1 = -(1/3)*sqrt(5 + 2*sqrt(10/7))', 'y_1 = f(x_1)', 'w_1 = (322 - 13*sqrt(70))/900
x_2 = -(1/3)*sqrt(5 - 2*sqrt(10/7))', 'y_2 = f(x_2)', 'w_2 = (322 + 13*sqrt(70))/900
x_3 = 0','y_3 = f(x_3)','w_3 = 128/225
'<p><strong>Integral</strong></p>
'Value -'I_G = 2*w_1*y_1 + 2*w_2*y_2 + w_3*y_3
'Error -'δ_G = abs(I_G - I)/I|%
'<p><strong>Scheme</strong></p>
$Plot{f(x) & x_1|0 & x_2|0 & x_3|0 & -x_2|0 & -x_1|0 @ x = -1 : 1}
'<h4>Tanh-sinh rule</h4>
'<hr/>
'Boundary of the interval -'t_a = 1
'Step -'h = 2*t_a/(n - 1)
'Parameters -'t(k) = -t_a + (k - 1)*h
'Function for abscissas -'x(k) = tanh(π/2*sinh(t(k)))
'Weight function -'w(k) = π*h*cosh(t(k))/(2*cosh(π/2*sinh(t(k)))^2)
'<p><strong>Abscissas, Ordinates, Weights</strong></p>
x_1 = x(1)', 'y_1 = f(x_1)', 'w_1 = w(1)
x_2 = x(2)', 'y_2 = f(x_2)', 'w_2 = w(2)
x_3 = x(3)', 'y_3 = f(x_3)', 'w_3 = w(3)
'<p><strong>Integral</strong></p>
'Value -'I_DE = 2*w_1*y_1 + 2*w_2*y_2 + w_3*y_3
'Error -'δ_DE = abs(I_DE - I)/I|%
'<p><strong>Scheme</strong></p>
$Plot{f(x) & x_1|0 & x_2|0 & x_3|0 & -x_2|0 & -x_1|0 @ x = -1 : 1}
'<h4>CalcpadCE</h4>
'<hr/>
'Adaptive Tanh-Sinh -'I_ATH = $Integral{f(x) @ x = -1 : 1}
'Error -'δ_ATH = abs(I_ATH - I)/I|%
'Adaptive Gauss-Lobatto -'I_AGL = $Area{f(x) @ x = -1 : 1}
'Error -'δ_AGL = abs(I_AGL - I)/I|%
Function - f ( x ) = √ 1 − x2
Theoretical value of the integral - I = π2 = 3.142 = 1.57
Number of nodes - n = 5
Step - h = 0.5
Abscissas, Ordinates
x1 = -1 , y1 = f ( x1 ) = f ( -1 ) = 0
x2 = -0.5 , y2 = f ( x2 ) = f ( -0.5 ) = 0.866
x3 = 0 , y3 = f ( x3 ) = f ( 0 ) = 1
Integral
Value - IB = 2 · h45 · ( 2 · 7 · y1 + 2 · 32 · y2 + 12 · y3 ) = 2 · 0.545 · ( 2 · 7 · 0 + 2 · 32 · 0.866 + 12 · 1 ) = 1.5
Error - δB = | IB − I |I = | 1.5 − 1.57 |1.57 = 4.61 %
Scheme

Abscissas, Ordinates and weights
x1 = - 13 · 5 + 2 · 107 = -0.906 , y1 = f ( x1 ) = f ( -0.906 ) = 0.423 , w1 = 322 − 13 · √ 70900 = 0.237
x2 = - 13 · 5 − 2 · 107 = -0.538 , y2 = f ( x2 ) = f ( -0.538 ) = 0.843 , w2 = 322 + 13 · √ 70900 = 0.479
x3 = 0 , y3 = f ( x3 ) = f ( 0 ) = 1 , w3 = 128225 = 0.569
Integral
Value - IG = 2 · w1 · y1 + 2 · w2 · y2 + w3 · y3 = 2 · 0.237 · 0.423 + 2 · 0.479 · 0.843 + 0.569 · 1 = 1.58
Error - δG = | IG − I |I = | 1.58 − 1.57 |1.57 = 0.325 %
Scheme

Boundary of the interval - ta = 1
Step - h = 2 · tan − 1 = 2 · 15 − 1 = 0.5
Parameters - t ( k ) = -ta + ( k − 1 ) · h
Function for abscissas - x ( k ) = tanh(π2 · sinh ( t ( k ) ) )
Weight function - w ( k ) = π · h · cosh ( t ( k ) ) 2 · cosh(π2 · sinh ( t ( k ) ) )2
Abscissas, Ordinates, Weights
x1 = x ( 1 ) = -0.951 , y1 = f ( x1 ) = f ( -0.951 ) = 0.308 , w1 = w ( 1 ) = 0.115
x2 = x ( 2 ) = -0.674 , y2 = f ( x2 ) = f ( -0.674 ) = 0.738 , w2 = w ( 2 ) = 0.483
x3 = x ( 3 ) = 0 , y3 = f ( x3 ) = f ( 0 ) = 1 , w3 = w ( 3 ) = 0.785
Integral
Value - IDE = 2 · w1 · y1 + 2 · w2 · y2 + w3 · y3 = 2 · 0.115 · 0.308 + 2 · 0.483 · 0.738 + 0.785 · 1 = 1.57
Error - δDE = | IDE − I |I = | 1.57 − 1.57 |1.57 = 0.0751 %
Scheme

Adaptive Tanh-Sinh - IATH = 1∫-1 f ( x ) dx = 1.57
Error - δATH = | IATH − I |I = | 1.57 − 1.57 |1.57 = 2.83×10-14 %
Adaptive Gauss-Lobatto - IAGL = 1∫-1 f ( x ) dx = 1.57
Error - δAGL = | IAGL − I |I = | 1.57 − 1.57 |1.57 = 0 %
Rayleigh Quotient Iteration¶
Computes the dominant eigenpair of a \(3\times 3\) symmetric matrix via Rayleigh-quotient iteration. Each step solves a shifted linear system, normalises the iterate and rebuilds the eigenvalue from the quotient, achieving cubic convergence within a handful of steps.
'Input matrix
A = copy( _
[4; 12; -16| _
12; 37; -43| _
- 16; -43; 98]; _
symmetric(3); 1; 1)
#hide
A_1 = A
n = n_rows(A)', 'I = identity(n)', 'o = vector(n)', 'λ_0 = 1', 'x = [1; 0; 0]
#show
'Initial guess: eigenvalue -'λ_0', eigenvector -'x
#def rqi$
#for i = 1 : 10
#val
'<h4>Iteration - 'i'</h4>
#equ
x = unit(inverse(A - λ_0*I)*x)
λ = transp(x)*A*x
#if abs(λ - λ_0) < 10^-3
#break
#end if
'<!--'λ_0 = λ'-->
#loop
#end def
rqi$
'<!--'λ_1 = λ', 'x_1 = x'-->
'<h4>Results</h4>
'Eigenvalue 1 -'λ_1
'Eigenvector 1 -'x_1
'Deflation -'A = A - λ*x*transp(x)
#hide
λ_0 = 10', 'x = [0; 1; 0]
rqi$
λ_2 = λ', 'x_2 = x
#show
'Eigenvalue 2 -'λ_2
'Eigenvector 2 -'x_2
'Deflation -'A = A - λ*x*transp(x)
#hide
λ_0 = 100', 'x = [0; 0; 1]
rqi$
λ_3 = λ', 'x_3 = x
#show
'Eigenvalue 3 -'λ_3
'Eigenvector 3 -'x_3
'Solution with CalcpadCE -'E = eigen(A_1)
'(symmetric QL algorithm with implicit shifts)
'Difference
R = E - [λ_1; -x_1|λ_2; -x_2|λ_3; x_3]
mnorm_e(R)
Input matrix
A = copy ( [4; 12; -16 | 12; 37; -43 | -16; -43; 98]; symmetric ( 3 ) ; 1; 1 ) = 412-16 1237-43 -16-4398
Initial guess: eigenvalue - λ0 = 1 , eigenvector - ⃗x = [1 0 0]
⃗x = unit ( inverse ( A − λ0 · I ) · ⃗x ) = unit ( inverse ( A − 1 · I ) · ⃗x ) = [-0.96 0.278 -0.0351]
λ = transp ( ⃗x ) · A · ⃗x = 0.0225
⃗x = unit ( inverse ( A − λ0 · I ) · ⃗x ) = unit ( inverse ( A − 0.0225 · I ) · ⃗x ) = [0.963 -0.265 0.0411]
λ = transp ( ⃗x ) · A · ⃗x = 0.0188
⃗x = unit ( inverse ( A − λ0 · I ) · ⃗x ) = unit ( inverse ( A − 0.0188 · I ) · ⃗x ) = [-0.963 0.265 -0.0411]
λ = transp ( ⃗x ) · A · ⃗x = 0.0188
Eigenvalue 1 - λ1 = 0.0188
Eigenvector 1 - ⃗x1 = [-0.963 0.265 -0.0411]
Deflation - A = A − λ · ⃗x · transp ( ⃗x ) = A − 0.0188 · ⃗x · transp ( ⃗x ) = 3.9812-16 1237-43 -16-4398
Eigenvalue 2 - λ2 = 15.5
Eigenvector 2 - ⃗x2 = [0.213 0.849 0.484]
Deflation - A = A − λ · ⃗x · transp ( ⃗x ) = A − 15.5 · ⃗x · transp ( ⃗x ) = 3.289.2-17.6 9.225.82-49.37 -17.6-49.3794.37
Eigenvalue 3 - λ3 = 123.48
Eigenvector 3 - ⃗x3 = [-0.163 -0.457 0.874]
Solution with CalcpadCE - E = eigen ( A1 ) = 0.01880.963-0.2650.0411 15.5-0.213-0.849-0.484 123.48-0.163-0.4570.874
(symmetric QL algorithm with implicit shifts)
Difference
R = E − [λ1; -⃗x1 | λ2; -⃗x2 | λ3; ⃗x3] = E − [0.0188; -⃗x1 | 15.5; -⃗x2 | 123.48; ⃗x3] = -7.22×10-16-2.22×10-16-3.33×10-16-1.11×10-16 1.01×10-137.23×10-8-1.98×10-82.88×10-9 2.84×10-143.19×10-98.94×10-95.27×10-9
mnorme ( R ) = 7.58×10-8
System of Nonlinear Equations¶
Solves a 4-variable nonlinear system three ways — fixed-point iteration, Newton-Raphson with the analytical Jacobian, and Broyden quasi-Newton — converging on the same root with very different iteration counts and step sizes.
'<!--'x = [1; 1; 1; 1]','g(x) = 0','g_k(x) = 0','f′(x) = 0','J(x) = 0'-->
#noc
'Given the following real system of equations:
' <div style="border-left:solid 1pt; margin-left:2em; padding-left:4pt;">
5*x.1 + 4*x.2 + x.3 - x.4^2'='0
x.1^2 - x.2 + 2*x.3 - sqrt(x.4) - 3'='0
3*x.1^3 - 2*x.2^3 + 3*x.3 + 2*x.4 - 4'='0
4*x.1 - 3*x.2 + x.3^2 + x.4 - 11'='0
'</div>
'Find:'x.1'= ?,'x.2'= ?,'x.3'= ?,'x.4'= ?
'<h3>Solution</h3>
'<h4>1. Fixed point iteration method</h4>
'Fixed point iteration is the slowest, but also the most simple and intuitive method for solving nonlinear equations of type'f(x) = 0'. First, the equation is transformed into the following expression:'x'='g(x)'. Then, starting from an initial guess'x_⁰', it is repeatedly executed until it hopefully converges, as follows:
' 'x_ⁿ⁺¹ = g(x_ⁿ)
'In the multidimensional case, the solution is performed in the following way:
'Rearrange the equations in the form:'x.k'='g_k(x)', so that'g_k(x)'is contractive. We will use the following expressions for the functions'g_k(x)':
#equ
' 'g_4(x) = sqrt(abs(5*x.1 + 4*x.2 + x.3))
' 'g_1(x) = sqrt(abs(x.2 - 2*x.3 + sqrt(abs(x.4)) + 3))
' 'g_2(x) = cbrt((3*x.1^3 + 3*x.3 + 2*x.4 - 4)/2)
' 'g_3(x) = sqrt(abs(-4*x.1 + 3*x.2 - x.4 + 11))
'Select an initial guess -'x = [2; 2; 2; 2]
'Set the relative precision -'ε_max = 10^-15
#hide
#for n = 1 : 1000
x⁰ = join(x)
x.1 = g_1(x)','x.2 = g_2(x)
x.3 = g_3(x)','x.4 = g_4(x)
δx = x - x⁰
ε = norm_e(δx)/norm_e(x)
#if ε < ε_max
#break
#end if
#loop
#show
'Calculate the following expressions iteratively (the last results are displayed only):
' 'x⁰ = join(x)' - store a copy of the previous vector <var>x</var>
' Update the solution vector with a new approximation
' 'x.1 = g_1(x)','x.2 = g_2(x)','x.3 = g_3(x)','x.4 = g_4(x)
' 'δx = x - x⁰'- difference
' 'ε = norm_e(δx)/norm_e(x)'- relative error
#noc
'Loop until'ε'<'ε_max'or'n'≤'1000'(guard limit in case of divergence).
#equ
'Completed in'n'iterations at'ε'<'ε_max'.
'Result -'x
'Check:
' '5*x.1 + 4*x.2 + x.3 - x.4^2
' 'x.1^2 - x.2 + 2*x.3 - sqrt(x.4) - 3
' '3*x.1^3 - 2*x.2^3 + 3*x.3 + 2*x.4 - 4
' '4*x.1 - 3*x.2 + x.3^2 + x.4 - 11
'<h4>2. Newton-Raphson’s method</h4>
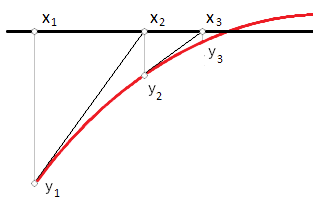
'In the one-dimensional case, we obtain the solution iteratively by constructing the tangent line to the function at the current point and intersecting it with the abscissa to obtain the next point.
'<img style="height:100pt; width:160pt;" src="./Newton.png" alt="Newton.png">
#noc
'This process can be represented by the following equation -'x_ⁿ⁺¹ = x_ⁿ - f(x_ⁿ)/f′(x_ⁿ)
'In the multidimensional case, 'x' is a vector, 'f' is a vector-valued function, and 'f′' is replaced by the matrix of the partial derivatives, called "Jacobian" ('J'). So, the above equation is transformed to the expression:'x_ⁿ⁺¹ = x_ⁿ - J(x_ⁿ)^-1*f(x_ⁿ)', where'J_ij = df_i/dx_j'. The solution is performed as follows:
#equ
'Define the equations as functions:
' 'f_1(x) = 5*x.1 + 4*x.2 + x.3 - x.4^2
' 'f_2(x) = x.1^2 - x.2 + 2*x.3 - sqrt(abs(x.4)) - 3
' 'f_3(x) = 3*x.1^3 - 2*x.2^3 + 3*x.3 + 2*x.4 - 4
' 'f_4(x) = 4*x.1 - 3*x.2 + x.3^2 + x.4 - 11
'Represent the whole system as a single vector-valued function:
' 'f(x) = [f_1(x); f_2(x); f_3(x); f_4(x)]
#noc
'Define the Jacobian matrix containing the partial derivatives of the function'f':
#equ
J(x) = [5; 4; 1; -2*x.4| _
2*x.1; -1; 2; -1/(2*sqrt(abs(x.4)))| _
9*x.1^2; -6*x.2^2; 3; 2| _
4; -3; 2*x.3; 1]
#equ
'Initial guess -'x = [2; 2; 2; 2]
#hide
#for n = 1 : 1000
x⁰ = x
δx = inverse(J(x⁰))*f(x⁰)
ε = norm_e(δx)/norm_e(x)
#if ε < ε_max
#break
#end if
x = x⁰ - δx
#loop
#show
'Calculate the following expressions iteratively (the last results are displayed only):
' 'x⁰ = x' - store the previous vector <var>x</var>
' 'δx = inverse(J(x⁰))*f(x⁰)'- difference
' 'x = x⁰ - δx'- update the solution vector
' 'ε = norm_e(δx)/norm_e(x)'- relative error
#noc
'Loop until'ε'<'ε_max'or'n'≤'1000'(guard limit in case of divergence).
#equ
'Completed in'n'iterations at'ε'<'ε_max'.
'Result -'x
'Check -'f(x)
'<h4>3. Broyden’s method</h4>
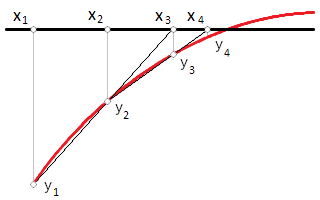
'The Broyden’s method is the mulidimensional equivalent to the secant method. It is similar to Newton’s method, but instead of calculating the inverse Jacobian on each iteration, it uses the secant between two consecutive approximations.
'<img style="height:100pt; width:160pt;" src="./Secant.png" alt="Secant.png">
'Although its convergence is slower, it avoids the heavy operation on computing and inverting the Jacobian each time. The solution is performed as follows:
#equ
'Initial guess -'x⁰ = [2; 2; 2; 2]
'Find the first approximation by using the Jacobian as in Newton-Raphson’s method
y⁰ = f(x⁰)
J_inv = inverse(J(x⁰))
x¹ = x⁰ - J_inv*y⁰
y¹ = f(x¹)
'Correction factor to improve stability -'α = 0.9
#hide
#for n = 1 : 1000
Δx = x¹ - x⁰
Δy = y¹ - y⁰
ΔxT = transp(Δx)
ΔxTJΔy = ΔxT*J_inv*Δy
J_inv = J_inv + (Δx - J_inv*Δy)/ΔxTJΔy*ΔxT*J_inv
δx = J_inv*y¹
ε = norm_e(δx)/norm_e(x)
#if ε < ε_max
#break
#end if
x² = x¹ - α*δx
y² = f(x²)
x⁰ = x¹','y⁰ = y¹
x¹ = x²','y¹ = y²
#loop
#show
'Calculate the following expressions iteratively (the last results are displayed only):
' 'y⁰ = f(x⁰)'- function values at prev. step
' 'x¹ = x⁰ - J_inv*y⁰'- current step approximation
' 'y¹ = f(x¹)'- function values at current step
' 'Δx = x¹ - x⁰'- difference in approximations
' 'Δy = y¹ - y⁰'- difference in function values
' Update the inverse of the Jacobian using the Sherman–Morrison formula:
' 'ΔxTJ_inv = transp(Δx)*J_inv
' 'ΔxTJΔy = ΔxTJ_inv*Δy
' 'J_inv = J_inv + (Δx - J_inv*Δy)/ΔxTJΔy*ΔxTJ_inv
' 'δx = J_inv*y¹'- difference
' 'x⁰ = x¹ - α*δx'- next approximation
' 'ε = norm_e(δx)/norm_e(x)'- relative error
#noc
'Loop until'ε'<'ε_max'or'n'≤'1000'(guard limit in case of divergence).
#equ
'Completed in'n'iterations at'ε'<'ε_max'.
'Result -'x⁰
'Check -'f(x⁰)
Given the following real system of equations:
5 · x1 + 4 · x2 + x3 − x42 = 0
⃗x12 − x2 + 2 · x3 − √ x4 − 3 = 0
3 · x13 − 2 · x23 + 3 · x3 + 2 · x4 − 4 = 0
4 · x1 − 3 · x2 + x32 + x4 − 11 = 0
Find: ⃗x1 = ?, ⃗x2 = ?, ⃗x3 = ?, ⃗x4 = ?
Fixed point iteration is the slowest, but also the most simple and intuitive method for solving nonlinear equations of type f ( x ) = 0 . First, the equation is transformed into the following expression: ⃗x = g ( ⃗x ) . Then, starting from an initial guess x⁰ , it is repeatedly executed until it hopefully converges, as follows:
xⁿ⁺¹ = g ( xⁿ )
In the multidimensional case, the solution is performed in the following way:
Rearrange the equations in the form: ⃗xk = gk ( ⃗x ) , so that gk ( ⃗x ) is contractive. We will use the following expressions for the functions gk ( ⃗x ) :
g4 ( x ) = √ | 5 · x1 + 4 · x2 + x3 |
g1 ( x ) = √ | x2 − 2 · x3 + √ | x4 | + 3 |
g2 ( x ) = 3 3 · x13 + 3 · x3 + 2 · x4 − 42
g3 ( x ) = √ | -4 · x1 + 3 · x2 − x4 + 11 |
Select an initial guess - ⃗x = [2; 2; 2; 2] = [2 2 2 2]
Set the relative precision - εmax = 10-15
Calculate the following expressions iteratively (the last results are displayed only):
⃗x⁰ = join ( ⃗x ) = [1 2 3 4] - store a copy of the previous vector x
Update the solution vector with a new approximation
⃗x1 = g1 ( ⃗x ) = 1 , ⃗x2 = g2 ( ⃗x ) = 2 , ⃗x3 = g3 ( ⃗x ) = 3 , ⃗x4 = g4 ( ⃗x ) = 4
⃗δx = ⃗x − ⃗x⁰ = [-3.55×10-15 -1.33×10-15 1.78×10-15 -2.66×10-15] - difference
ε = norme ( ⃗δx ) norme ( ⃗x ) = 9.06×10-16 - relative error
Loop until ε < εmax or n ≤ 1000 (guard limit in case of divergence).
Completed in n = 256 iterations at ε = 9.06×10-16 < εmax = 10-15 .
Result - ⃗x = [1 2 3 4]
Check:
5 · ⃗x1 + 4 · ⃗x2 + ⃗x3 − ⃗x42 = 3.55×10-15
⃗x12 − ⃗x2 + 2 · ⃗x3 − √ ⃗x4 − 3 = 5.77×10-15
3 · ⃗x13 − 2 · ⃗x23 + 3 · ⃗x3 + 2 · ⃗x4 − 4 = 0
4 · ⃗x1 − 3 · ⃗x2 + ⃗x32 + ⃗x4 − 11 = -2.66×10-15
In the one-dimensional case, we obtain the solution iteratively by constructing the tangent line to the function at the current point and intersecting it with the abscissa to obtain the next point.
This process can be represented by the following equation - xⁿ⁺¹ = xⁿ − f ( xⁿ ) f′ ( xⁿ )
In the multidimensional case, ⃗x is a vector, f is a vector-valued function, and f′ is replaced by the matrix of the partial derivatives, called "Jacobian" ( J ). So, the above equation is transformed to the expression: xⁿ⁺¹ = xⁿ − J ( xⁿ ) -1 · f ( xⁿ ) , where Jij = dfidxj . The solution is performed as follows:
Define the equations as functions:
f1 ( x ) = 5 · x1 + 4 · x2 + x3 − x42
f2 ( x ) = x12 − x2 + 2 · x3 − √ | x4 | − 3
f3 ( x ) = 3 · x13 − 2 · x23 + 3 · x3 + 2 · x4 − 4
f4 ( x ) = 4 · x1 − 3 · x2 + x32 + x4 − 11
Represent the whole system as a single vector-valued function:
f ( x ) = [f1 ( x ) ; f2 ( x ) ; f3 ( x ) ; f4 ( x ) ] !!!
Define the Jacobian matrix containing the partial derivatives of the function f :
J ( x ) = [5; 4; 1; -2 · x4 | 2 · x1; -1; 2; -12 · √ | x4 | | 9 · x12; -6 · x22; 3; 2 | 4; -3; 2 · x3; 1] !!!
Initial guess - ⃗x = [2; 2; 2; 2] = [2 2 2 2]
Calculate the following expressions iteratively (the last results are displayed only):
⃗x⁰ = ⃗x = [1 2 3 4] - store the previous vector x
⃗δx = inverse ( J ( ⃗x⁰ ) ) · f ( ⃗x⁰ ) = [3.21×10-15 8.03×10-16 -1.84×10-15 2.4×10-15] - difference
⃗x = ⃗x⁰ − ⃗δx = [1 2 3 4] - update the solution vector
ε = norme ( ⃗δx ) norme ( ⃗x ) = 8.19×10-16 - relative error
Loop until ε < εmax or n ≤ 1000 (guard limit in case of divergence).
Completed in n = 12 iterations at ε = 8.19×10-16 < εmax = 10-15 .
Result - ⃗x = [1 2 3 4]
Check - f ( ⃗x ) = [1.78×10-15 0 1.78×10-15 0]
The Broyden’s method is the mulidimensional equivalent to the secant method. It is similar to Newton’s method, but instead of calculating the inverse Jacobian on each iteration, it uses the secant between two consecutive approximations.
Although its convergence is slower, it avoids the heavy operation on computing and inverting the Jacobian each time. The solution is performed as follows:
Initial guess - ⃗x⁰ = [2; 2; 2; 2] = [2 2 2 2]
Find the first approximation by using the Jacobian as in Newton-Raphson’s method
⃗y⁰ = f ( ⃗x⁰ ) = [16 1.59 14 -3]
Jinv = inverse ( J ( ⃗x⁰ ) ) = -0.4772.3-0.0514-0.993 -0.8163.87-0.135-1.63 0.265-1.02-0.0002650.696 -1.66.49-0.2-2.69
⃗x¹ = ⃗x⁰ − Jinv · ⃗y⁰ = [3.73 5.94 1.49 11.97]
⃗y¹ = f ( ⃗x¹ ) = [-99.47 4.47 -239.78 0.265]
Correction factor to improve stability - α = 0.9
Calculate the following expressions iteratively (the last results are displayed only):
⃗y⁰ = f ( ⃗x⁰ ) = [-1.78×10-15 2.44×10-15 7.37×10-14 8.88×10-15] - function values at prev. step
⃗x¹ = ⃗x⁰ − Jinv · ⃗y⁰ = [1 2 3 4] - current step approximation
⃗y¹ = f ( ⃗x¹ ) = [0 -2.22×10-16 8.88×10-16 1.78×10-15] - function values at current step
⃗Δx = ⃗x¹ − ⃗x⁰ = [3×10-15 4.22×10-15 -1.78×10-15 3.55×10-15] - difference in approximations
⃗Δy = ⃗y¹ − ⃗y⁰ = [1.78×10-15 -2.66×10-15 -7.28×10-14 -7.11×10-15] - difference in function values
Update the inverse of the Jacobian using the Sherman–Morrison formula:
ΔxTJinv = transp ( ⃗Δx ) · Jinv = -3.06×10-151.88×10-142.62×10-16-1.27×10-14
ΔxTJΔy = ΔxTJinv · ⃗Δy = 1.53×10-29
Jinv = Jinv + ⃗Δx − Jinv · ⃗ΔyΔxTJΔy · ΔxTJinv = Jinv + ⃗Δx − Jinv · ⃗Δy1.53×10-29 · ΔxTJinv = -0.9986.070.114-4.11 -0.3122.5-0.00482-1.56 0.674-3.68-0.09312.75 -0.8484.80.068-3.21
⃗δx = Jinv · ⃗y¹ = [-8.55×10-15 -3.33×10-15 5.63×10-15 -6.7×10-15] - difference
⃗x⁰ = ⃗x¹ − α · ⃗δx = ⃗x¹ − 0.9 · ⃗δx = [1 2 3 4] - next approximation
ε = norme ( ⃗δx ) norme ( ⃗x ) = 2.32×10-15 - relative error
Loop until ε < εmax or n ≤ 1000 (guard limit in case of divergence).
Completed in n = 28 iterations at ε = 2.32×10-15 < εmax = 10-15 .
Result - ⃗x⁰ = [1 2 3 4]
Check - f ( ⃗x⁰ ) = [0 1.33×10-15 -3.55×10-15 -8.88×10-16]
Spotted an error? Edit these examples.